AGV(無人搬送車)システムの効率と安定性を最適化する産業向け物流管理ソリューション
16/11/2566
土地や人件費の高騰を背景に、多くの企業が倉庫および物流管理の効率化と収益性の向上に課題を抱えています。そうした中、スマート物流システムは大企業にとって、ますます有力な選択肢となりつつあります。 AGV(無人搬送車)を用いた物流システムにおいては、その制御システムの安定性や、他の主要システムとの連携が非常に重要です。これらの要素は、物流全体の効率性、安全性、安定性を左右する中核的な役割を担っています。
システム要件
- AGVシステムでは、フォークリフトアームの伸縮制御にサーボドライブと接続するためのEtherCATバスが必要であり、車両の電力システムと接続するにはCANバスのサポートも求められました。また、ワイヤレスクライアントとの接続にはシリアルポートの利用も必要でした。
- AGVシステムには、スケジューリングシステムからの経路指示を処理・計算するための高い処理能力とオペレーティングシステム、さらに3Dインターフェイス表示機能が求められました。
- コントローラには、車両のボディサイズやバッテリー要件を満たすため、コンパクトで低電圧なDC電源と低消費電力であることが求められました。
システム概要
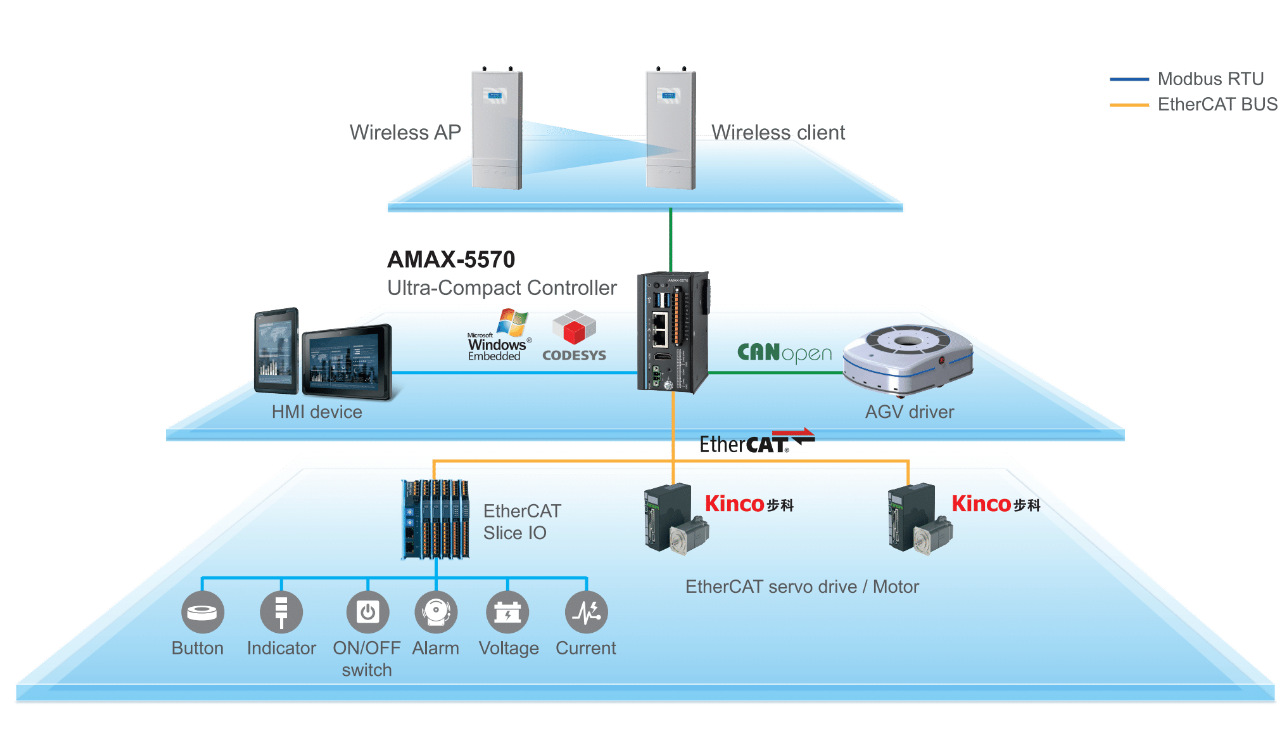
- コントローラ:CODESYS対応統合コントローラ AMAX-5570
- I/Oモジュール:AMAX-5000 EtherCATプラグインI/Oモジュール
- 制御ソフトウェア:CODESYS V3.5
- オペレーティングシステム:Windows 7 64ビット
ソリューション概要
- AMAX-5570は、EtherCAT、CANバス、Modbus TCP、シリアルインターフェイスに対応しており、AGVに必要な周辺機器を一通り備えています。
- Windows環境およびSoftPLC CODESYSリアルタイムコアに対応し、x86アーキテクチャのプロセッサ搭載により、多様なデータ処理や表示機能を可能にしています。
- 本製品は、48.8×100×70mmのコンパクトなサイズで、10~36V DCの電源に対応しており、AGVの要件に適合します。
- ファンレスの組込み設計とレールマウント方式を採用しており、安定した長期運用を実現します。これにより、物流システム全体の安定性と効率性が向上します。
-25/AMAX-5570-B_03--20250708152451.png)